
PyLoad
Descarga desde cualquier alojamiento.
Visión general
PyLoad es un gestor de descargas directas (DDL) de código abierto escrito en Python. Soporta varios cientos de alojamientos populares: 1fichier, Uptobox, Mega, MediaFire, RapidGator, y muchos más.
Le das una lista de enlaces, PyLoad descarga todo automáticamente en paralelo, gestiona cuentas premium, resuelve captchas cuando es posible, y organiza los archivos en tu seedbox. Ideal para descargar un pack completo sin quedarte frente a la pantalla.
Gracias a su sistema de plugins, PyLoad se adapta a los nuevos alojamientos y protocolos. Es la herramienta perfecta si consumes muchos contenidos vía alojamientos de archivos en lugar de trackers torrent.
Puntos fuertes
Cientos de alojamientos.
Soporte nativo de los mayores DDL: 1fichier, Uptobox, Mega, MediaFire, RapidGator, TurboBit y muchos más.
Descargas paralelas.
Descarga varios archivos simultáneamente para aprovechar al máximo el ancho de banda de tu seedbox.
Cuentas premium gestionadas.
Añade tus cuentas premium directamente en PyLoad, las usará automáticamente para desbloquear los límites.
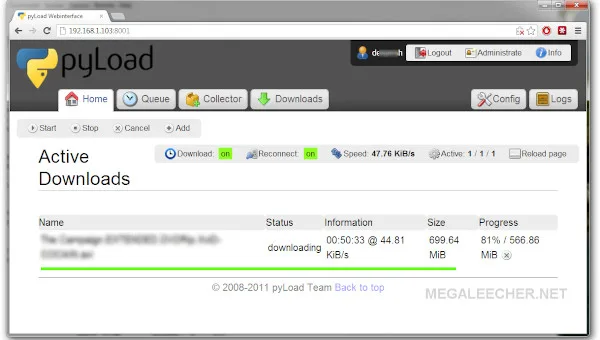
Interfaz web completa.
Gestiona tus colas, recopila enlaces, sigue el progreso desde cualquier navegador.
Integrado en tu seedbox
PyLoad está disponible a demanda en tu área de cliente. Instalación en 1 clic, acceso HTTPS directo, credenciales recibidas por email. Comparte el almacenamiento de tu seedbox y usa el ancho de banda dedicado.
- check_circle Instalación bajo demanda en segundos
- check_circle Interfaz web HTTPS segura
- check_circle Comparte el almacenamiento de tu seedbox
- check_circle Compatible con la mayoría de cuentas premium
Preguntas frecuentes
¿PyLoad o JDownloader? expand_more
¿Puedo usar mis cuentas premium? expand_more
Algunos alojamientos muestran captchas, ¿cómo funciona? expand_more

¿Listo para lanzar tus primeras descargas?
Todas estas aplicaciones están incluidas en nuestros planes seedbox. Sin software que instalar, sin configuración compleja: tu servidor está listo en minutos.
Ver nuestros planes arrow_forward